Einleitung & Hintergrund
Nach langer Blogabstinenz melde ich mich wieder zurück mit einem kleinen Beitrag über etwas Einfaches, das aber ziemlich nützlich und interessant ist: ein Modellbauservo-Tester. Hier lassen sich Theorie und Praxis lehrriech und gut untersuchen. Wollte immer schon so einen Servotester haben. Beim Pollin gibts den ganz günstig.Ich werde den Bausatz kurz vorstellen und ein paar Messungen zu seiner Performance machen. Dann möchte ich noch dei Schaltung simulieren (das wird erst in einem 2. Beitrag passieren) und sehen, wie gut die Simulationsergebnisse mit der Realität übereinstimmen. Also eine schöne Möglichkeit an einem einfachen Projekt einiges auszuprobieren.

Schön verpackt, wie man es gewöhnt ist ;-)
Ist nix anders wie ein PWM-Generator mit 555er Chips (bzw. einem Dual 555 also ein556). Mit ein paar Widerständen einem Poti und ein paar Kondensatoren lassen sich prima PWMs damit machen - genau in dem Bereich, um einen Standardservo auf Funktionstüchtigkeit zu prüfen.
Ich verstehe immer nur PWM... Aber wie funktioniert so eine Servoansteuerung überhaupt genau. Zum Glück gibt es Wikipedia ;-):
Modellbauservos werden über eine Pulsweitenmodulation (PWM) angesteuert. Über die Breite der Pulse wird der Winkel, auf den der Servoarm gestellt werden soll, gesteuert. Gängig ist ein 50-Hz-Signal (20 ms Periodenlänge), welches zwischen 1 ms (linker Anschlag) und 2 ms (rechter Anschlag) auf High-Pegel und den Rest der Periodenlänge auf Low-Pegel ist. Viele Servos haben in diesem Wertebereich jedoch nicht ihre volle Bewegungsfreiheit ausgenutzt. Die Werte, bei denen der Servo ganz links bzw. rechts ist, können auch unterhalb 1 ms bzw. oberhalb 2 ms liegen. Die Periodendauer von 20 ms ist kein kritischer Wert und muss bei der Ansteuerung nicht genau eingehalten werden.Das Ding besteht nur aus einer kleinen Platine und wenigen Teilen und ist schnell aufgebaut. Mein Sohn Julian (4 Jahre) hat natürlich gerne dabei geholfen :-). Er durfte nach jeder Lötung die überstehenden Drahtstücke abzwicken.

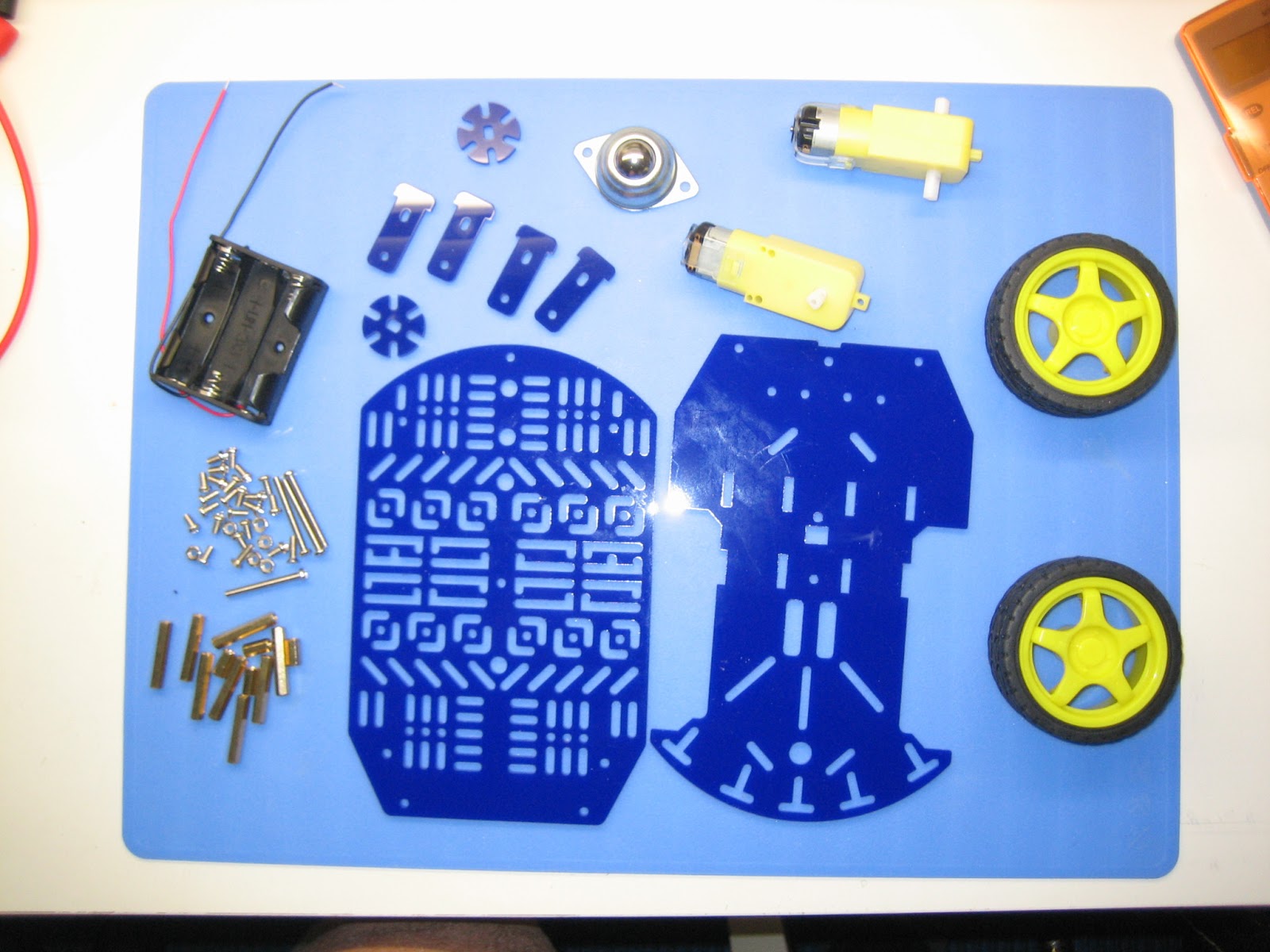
Das sind tatsächlich alle Teile

Fertig aufgebaut und in Aktion
Die Aufbau- und Bedienungsanleitung inlusive Spezifikation und Schaltplan befindet sich bei Pollin als PDF zum Download. Dort finden sich folgende Angaben zu den technischen Daten:
- Betriebsspannung: 6...12 V-, verpolungsgeschützt
- Motorlaststrom max.: 2 A
- PPM Bereiche: 0,9...2,2 ms (fein), 0,4...2,8 mm (grob)
- PPM Periodenlänge: 20 ms (50 Hz)
Windows 7: XP Mode Parallel Port
Das musste ich mir gleich mal auf meinem altertümlichen (aber für solche Dinge immer noch recht nützlichen) Voltcraft PSC64i Computer-Speichozsi mit Parallelportschnittstelle ansehen. Leider musste ich feststellen, dass es schon ein Wunder war, dass die dazugehörige Software unter Windows XP noch gelaufen war. Unter Windows 7 verweigert sie schlicht den Dienst. Zum Glück gibts den "Windows XP Mode" - eine virtuelle XP Maschine unter Windows 7 basierend auf Virutal PC.Wie dem nun mal so ist - jeder Bastler kennt das, werden in der aktuellsten Version von Virtual PC leider keine Parallelports mehr unterstützt... *ggg*. Ich wollte mir keine andere virtuelle Maschine wie z.B. Virtual Box installieren - vor allem hätte ich dort auch XP von Hand installieren müssen... Also begann ich im Mighty-Web zu recherchieren - und siehe da, Virtual PC unterstützt Parallelports immer noch, nur können sie nicht mehr über die GUI aktiviert und konfiguriert werden. Aber direkt über die XML-Konfigurationsdatei der virtuellen Maschine schon. Einfach ein paar Zeilen dort reinkopieren und man hat den Parallelport :-). Glück gehabt.
Ich hab einige Zeit gebraucht, um den Parallelport in Virtual PC unter Windows 7 für den Windows XP Mode zum Laufen zu bringen. Daher zur Hilfe für andere eine Kurze Anleitung:
- Die Virtual PC Master Konfigurationsdatei für den Windows XP Modelokalisieren: C:\Users\userxyz\AppData\Local\Microsoft\Windows Virtual PC\Virtuelle Computer\Windows XP Mode.vmc
- Das ist ein xml-file. Im Tag <super_io> folgendes hinzufügen (und ggf. vorhandene <parallel_port> Tags ersetzen):
<parallel_port>
<port_shared type="boolean">false</port_shared></parallel_port>
<port_type type="integer">0</port_type>
<parallel_port id="0">
<port_name type="string">LPT1 (378h-37Fh)</port_name></parallel_port>
<port_type type="integer">1</port_type>
Die Messungen
Die Oszi-Software ließ sich dann problemlos im XP-Mode installieren und läuft mit (gerade noch) akzeptabler Performance - aber sie läuft und erkennt auch das Oszi. Es lässt sich passabel damit messen. Die untenstehenden Bilder zeigen die Messergebnisse.Zuerst hab ich mir angesehen, ob die Grundfrequenz der PWM-Ansteuerung passt. Die muss ca. 20ms sein, ist aber kein kritischer Wert: 18ms passen also. Dann hab ich die einstellbaren Wertebereich der Pulsbreiten verifiziert. In der Grobeinstellung sind es gemessene 2,75 bis 0.5ms, was im Rahmen der Toleranzen ganz gut zu den spezifizierten Werten passt. In der Feineinstellung messe ich 2,25 bis 0,88ms - auch das ist eine zufriedenstellende Übereinstimmung mit der Spezifikation.
 |
| Übersichtsplot: ca. 20ms Periodendauer |
 |
| Grobeinstellung max. Pulsbreite: 2,75ms |
 |
| Grobeinstellung min. Pulsbreite: 0,5ms |
 |
| Feineinstellung max. Pulsbreite: 2,25ms |
 |
| Feineinstellung min. Pulsbreite: 0,88ms |