Unsere Plattform für Ideen, Austausch, Sammlung und Dokumentation von Elektronikprojekten und diversen anderen interessanten Dingen... Arduino, Raspberry Pi, Robotik, etc.
Donnerstag, 21. März 2013
Mein Name ist Bond - DAGU Magician DG-007
Mein erster kleiner Roboter (das Tutorialprojekt von letsmakerobots.com) war ja nur mit Doppelklebeband zusammengeklebt. Sah ganz nett aus und war kompakt, aber schon damals wollte ich gerne was Stabileres, Wertiges - aber trotzdem günstig. Auf den DAGU Magician DG-007 stieß ich schon vor längerer Zeit. Kostet unter 20 Euro, kommt aus China (woher sonst...) aber es gab in Deutschland keine Bezugsquellen. Und dann stieß ich vor kurzem auf exp-tech.de als ich auf der Suche nach Komponenten von Adafruit Industries war. Endlich eine Bezugsquelle in Deutschland :-).
Natürlich musste ich ihn sofort mitbestellen. Zu viel erwartet hab ich mir aufgrund des Preises nicht. Im Netz hab ich auch durchwachsene Kritiken zum Bausatz gelesen. Der erste Eindruck war ganz gut (abgesehen vom lieblosen verschweissten durchsichtigen Billigplastikbeutel in dem der Bausatz kam. Ein mickriges Blatt Papier mit ein paar Bildern zur Montage. Kein Text - braucht man aber auch nicht. Überrascht war ich von der guten Qualität der lasergeschnittenen Acrylplatten und -teile, die noch einseitig mit Schutzpapier vom Schneiden beklebt waren. Die Räder muten etwas "plasty" an sonst ist der eindruck aber generell posistiv. Der Geruch ist recht intensiv (wahrscheinlich der Reifengummi...).
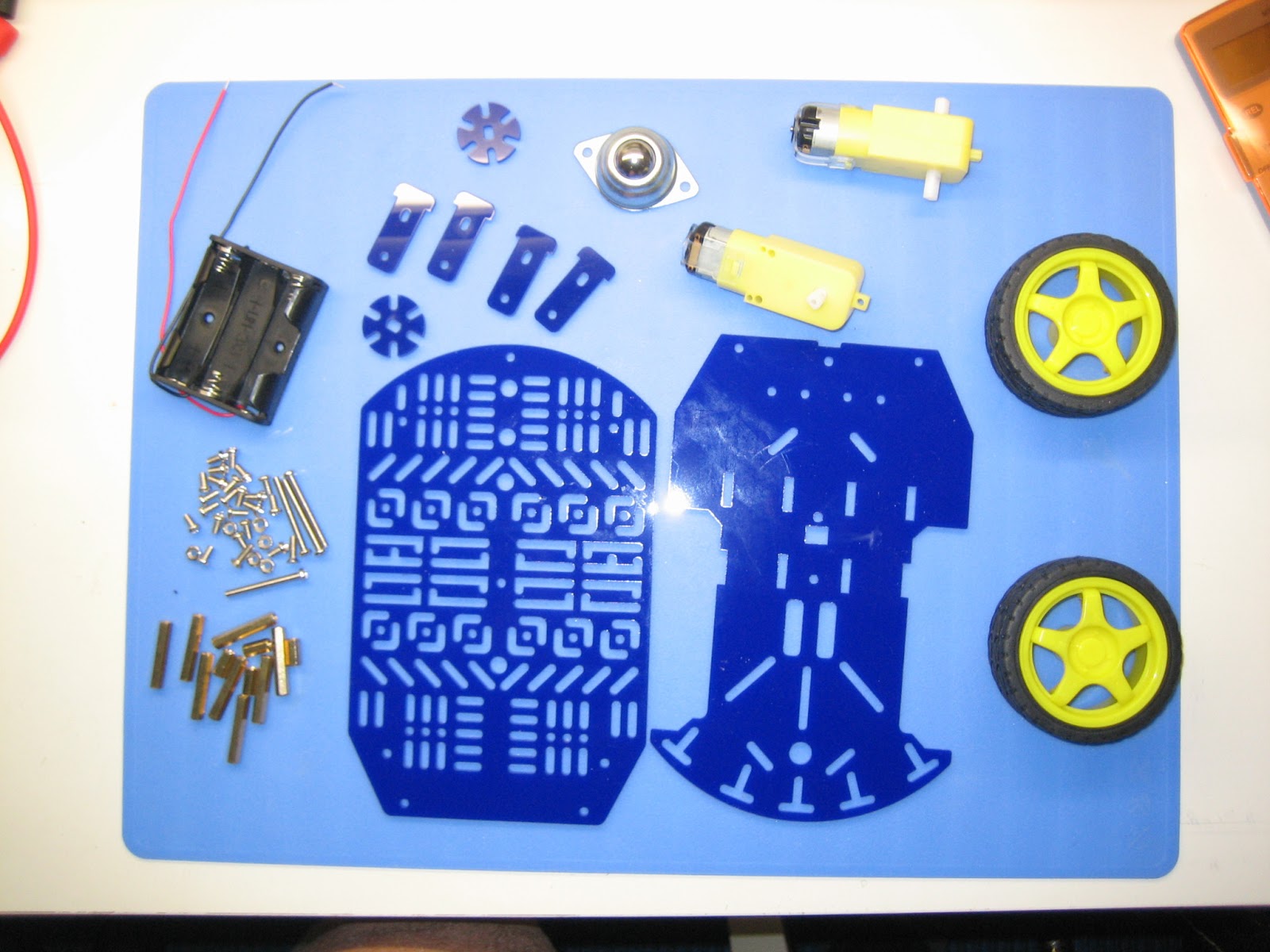
Die Einzelteile im Überblick
Was ist denn alles so drin (siehe Foto):
Boden- und Deckplatte aus Acryl
2 Kunststoffräder mit Gummireifen
2 Getriebemotoren
2 Odometrierädchen
4 Acrylhalter für die Motoren
Metallrollball als 3. Fuß
Batteriehalter (3x AA)
Schrauben und Abstandshalter
Der Zusammenbau ist simpel und geht einfach von der Hand. Als erstes montiert man die Motoren an der Bodenplatte und steckt die Odometrierädchen auf den auf der Innenseite herausgeführten Achsen auf. Die Sitzen etwas lose und reichen auch nicht wirklich in die ausgeschnittenen Schlitze der Bodenplatte hinein, aber wenn man Gabellichtschranken verwendet passt das schon. Die Motoren sollten mit jeweils der gleichen Seite nach außen montiert werden.
1. Schritt: Motoren montieren
Die Bohrungen in der Bodeplatte sind für die Montage eines 4x AA Batteriehaltes vorgesehen. Also muss man für den mitgelieferten Halter entweder ein zusätzliches Loch bohren (Dremel sei dank ;-)) oder - so wie ich - nur eine Schraube zur Befestigung verwenden. Dann kommen noch die Abstandshalter und der Rollball an die vorhergesehenen Stellen. Die Abstandshalter und die Schrauben sind von guter Qualität - da hab ich bei anderen Chinaprodukten schon wesentlich schlechteres gesehen. Die Räder lassen sich gut auf die Achsen aufstecken und sitzen dort recht fest. Ein Rad sitzt ein wenig schief, da offenbar der Druckguß der Felge nicht ganz optimal gelaufen ist - naja. Ist aber noch akzeptabel, da nichts an der Bodenplatte schleift.
Der nächste Schritt ist reichlich unspektakulär: Deckplatte drauf und passt. Und dann wir haben fertig :-).
3. Schritt: Deckplatte drauf und fertig
Noch ein Bildchen vom fertigen Teil
So, nun muss die neue Plattform natürlich gleich ausprobiert werden. Und was würde sich besser eignen als der idente Aufbau wie vom letsmakerobots.com Getting-Started Tutorial, das ich ja schon einmal nur mit Klebeband realisiert hatte? Noch ein Tip zum Anschluss der Motoren: da ich die Anschlüsse möglichst flexibel halten wollte, hab ich nicht direkt Kabel an die Lötösen der Motoren gelötet, sondern kleine Stifte, an die man die altbekannten und bewährten solderless Female Jumper-Wires anschließen kann. Beim Anlöten der Stift muss man den Motor aus dem Getrieb nehmen (um thermische Schäden am Kunsstoff zu vermeiden) und aufpassen, dass man die Kunstoffhalterung für den Motor nicht abreisst.
Das ist der fertige kleine Roboter ala letsmakerobots.com
Tata... jetzt ist er fertig. Dazu noch ein kleines Video. Die Software ist noch nicht auf die geänderte Geometrie der neuen Plattform und die etwas andere Übersetzung der Getriebemotoren adaptiert - aber darum ging es hier auch gar nicht.
Hi Chris! Super wieder ein Projekt von Dir zu sehen! Und natürlich Glückwunsch zum Robi. Das sieht in der Tat schon etwas professioneller aus, als der Eisstiel-Linefollower den wir ganz am Anfang zusammengeschustert haben ;-) Ich habe wie üblich tausend hochtrabende Bastelpläne und keine Zeit sie umzusetzten, aber ich hoffe, dass ich in den nächsten Wochen mal wieder eine Kleinigkeit hinbekommen werde. Soll mit dem Raspi zu tun haben und ich versuche gerade, mich zwischen verschiedenen Alternativen zu entscheiden. Drück mal Daumen, dass ich Zeit dafür finde.
Hi Phil! Ja, ich bin auch froh, dass ich wieder einen kleinen Beitrag geschafft habe. Hatte eigentlich einen anderen in der Pipeline aber dieser ging dann so zwischendurch. Freu mich schon auf dein Raspi Projekt. Das Ding kann so viel da kann man sich schwer entscheiden :-). Ich hab ja das Getboard als Bausatz - müsste ich mal aufbauen. Und einen Pi-Cobbler hab ich mir auch geholt ;-). Ich freu mich schon riesig wenn wir wieder mal eine gemütliche gemeinsame Bastelsession machen können.





Hi Chris! Super wieder ein Projekt von Dir zu sehen! Und natürlich Glückwunsch zum Robi. Das sieht in der Tat schon etwas professioneller aus, als der Eisstiel-Linefollower den wir ganz am Anfang zusammengeschustert haben ;-)
AntwortenLöschenIch habe wie üblich tausend hochtrabende Bastelpläne und keine Zeit sie umzusetzten, aber ich hoffe, dass ich in den nächsten Wochen mal wieder eine Kleinigkeit hinbekommen werde. Soll mit dem Raspi zu tun haben und ich versuche gerade, mich zwischen verschiedenen Alternativen zu entscheiden. Drück mal Daumen, dass ich Zeit dafür finde.
Hi Phil! Ja, ich bin auch froh, dass ich wieder einen kleinen Beitrag geschafft habe. Hatte eigentlich einen anderen in der Pipeline aber dieser ging dann so zwischendurch. Freu mich schon auf dein Raspi Projekt. Das Ding kann so viel da kann man sich schwer entscheiden :-). Ich hab ja das Getboard als Bausatz - müsste ich mal aufbauen. Und einen Pi-Cobbler hab ich mir auch geholt ;-). Ich freu mich schon riesig wenn wir wieder mal eine gemütliche gemeinsame Bastelsession machen können.
AntwortenLöschen