Vorbemerkung:
Dieser Beitrag existiert schon ewig als Enwurf (seit 2013!!). Daher ist es an der Zeit ihn mal zu bringen - zumindest als Teil #1 einer Serie. Er deckt nur mal die mechanischen Aspekte ab. Zum Programmieren bin ich nie groß gekommen, das hängt aber auch damit zusammen, dass ich die Picaxe-Umgebung und Sprache nicht so mag. Mittlerweile in der neuesten Version ist sie viel besser geworden, und vielleicht wird es ja nochmal was ;-).
Jetzt geht's los...
In diesem Beitrag stelle ich einen kleinen 2-Füßigen Roboter vor, der mit minimalen Mitteln (3 Servos, ein Micro und ein paar Farb-Rührhölzer) zu realisieren ist. Wie viele andere meiner Projekte (ich lerne ja noch ;-)) ist es leider keine eigene neue Idee, sondern ein Nachbau von einem Projekt, dass Frits Lyneborg auf seinem Make-Blog "Latest in Hobby Robotics" vorgestellt hat. Frits ist auch Mit-Initiator von letsmakerobots.com und auch dort ist der Roboter zu finden: Biped Walker with 3 Servos (Dead Duck Walking)
Farbrührhölzer oder Rührstäbe gibt's im Baumarkt für kleines Geld, vor allem die mit aufgedruckter Werbung. Die sind für kleine Projekte insofern super, da sie in Standardgrößen kommen und aus Hartholz bestehen.
Das ganze startet denkbar einfach, nämlich mit dem Absägen von 4 gleich langen Stücken (jeweils 1,5 Servolängen) von einem großen Farbrührholz (5mm dick, 30mm breit und ca. 30cm lang). Falls keine Rührhölzer zur Hand sind, gibt es Buchenholzleisten mit dieser Dicke und Breit im Baumarkt (Bastelholz). Nun werden jeweils 2 Löcher reingebohrt (Größe: M4 Schrauben sollen sich darin gut drehen können).

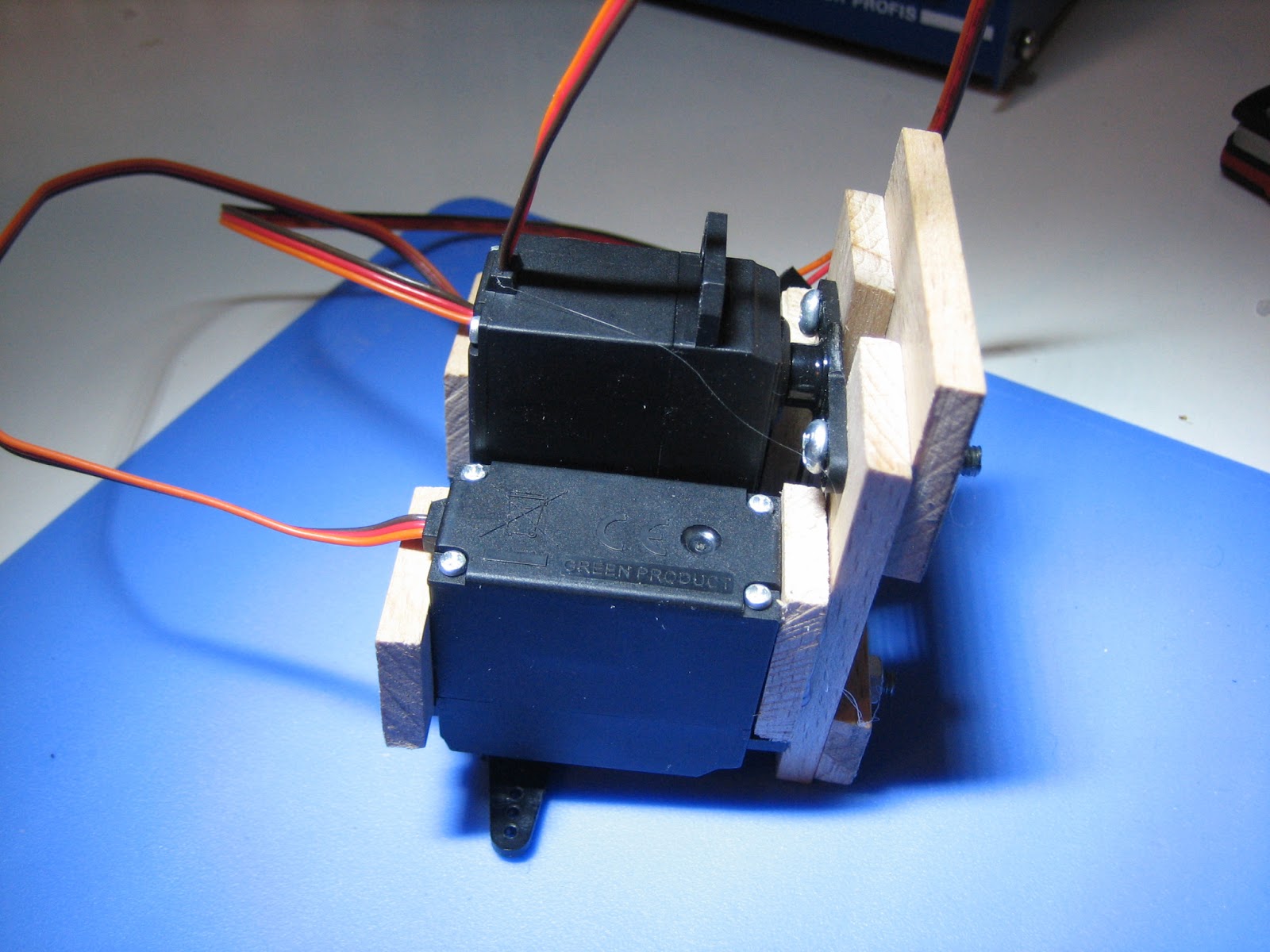
Als nächstes werden auf zwei Standardservos (ich verwende RS-2 von Modelcraft vom Völkner bzw. Conrad) Holzstückchen mit Heißkleber aufgeklebt, wie auf den folgenden Bildern zu sehen. Die Servohalterungen werden mit eine Feile abgeflacht, sodass sie mit dem Holzplättchen plan abschließen.


Die beiden Flächen die sich auf dem Bild unter diesem Absatz berühren, müssen gut gegeneinander gleiten können und werden mit einer Feile zu diesem Zweck entsprechend behandelt.

Nun werden 3 Stücke mit genau Servolänge (inkl der angeklebten Holzplättchen) abgesägt und eines der länge nach halbiert.

Die 4 enstandenen Stücke werden folgendermaßen mit ein wenig Heißkleber aufeinandergeklebt, um die folgende Bohrung zu erleichtern.

Nun brauchen wir ein reines Längs-Servohorn. Da bei meinen nur Kreuzhörner dabei waren, hab ich diese mit der Zange zurechtgeknipst. Weiters habe ich die Oberseite des Horns plan geschliffen.

Das Servohorn kommt jetzt auch mit Heißkleber auf den "Holzstapel".

Jetzt folgen die versprochenen Löcher ;-).

Danach das ganze wieder in seine Einzelteile brechen und somit haben wir alle Teile beieinander und können bald mit der Montage beginnen.

Aber bevor ich mit dem Zusammenbau beginnen kann, muss ich die Servos in der Mittelstellung haben. Damit das gelingt, hab ich mein kleines Picaxe Projektboard, namlich das AXE230 PICAXE-08M MODULE verwendet (wie auch bei letsmakerobots vorgeschlagen; mittlerweile gibt es schon den Nachfolger AXE231) und ein einfaches Programm geschrieben, um die Servos zu zentrieren.

Natürlich musste ich das unbedingt in einem kleinen Youtube-Video dokumentieren ;-).
So, nun beginnt die eigentliche Montage. Die Bilder sprechen soweit für sich. Im Originalbeitrag auf letsmakerobots.com gibt es auch ein 5-minütiges Video, dass die Montage zeigt. Ist alles in allem nicht sonderlich schwierig. Als erstes kommt der mittlere Servo dran, der die Wank-Bewegung des Roboters übernehmen wird (oder "Rollbewegung" für die Profis).



Hier nochmal ein Close-up Foto vom AXE230 Projektboard. Ist einfach über die serielle Schnittstelle programmierbar (mit einem USB-to-Serial-Adapter). Cool ist, dass das Teil out-of-the-box Header für bis zu 4 Servos hat. Wenn da halt nicht das Picaxe-Basic wäre, das ich nicht so prickelnd finde...

Nun werden die zwei Fuß-Servos links und rechts neben den mittleren Servo montiert. Diese Servos werden die Drehbewegung der Füße um die Hochachse übernehmen. Die grundlegende Idee ist ja, durch wechselseitiges Wanken des Walkers und dazupassendes Drehen der Füße eine Vorwärtsbewegung zu erzeugen.



Dann kommt ein Rührstabteil als "Kopf" rauf. dort wird auch das Batteriefach draufmontiert. Natürlich alles mit Heißkleber - what else ;-).

Dann noch die Fußflächen unten an die Servos kleben und "dada" fertig ist das Teil. Ach ja, die Schrauben müssen so angezogen und die Löcher so dimensioniert werden, dass sich alles leicht bewegen lässt. Die Muttern hab ich mit Schraubensicherung gesichert, dass sie sich im Betrieb nicht lösen.


So, dann haben wir's fast mit der Mechanik. Zum Schluss noch zwei ganz frische aktuelle Fotos (Jan. 2016) vom fertigen Walker-Roboter. Hab ihn in einer meiner großen Projektkisten wiedergefunden ;-). Ich hoffe, dass es auch einen Teil 2# zu diesem Projekt geben wird. Vielleicht dann in 2018 oder so - na ich hoffe nicht, dass es so lange dauert. Und mit der neuesten Picaxe Entwicklungsumgebung ist das programmieren dieser Dinger auch nicht mehr ganz so schlimm wie früher.


Lustiges Teil. Bin schon gespannt ihn Steptanzen zu sehen, oder was immer Dir in Sachen Programmierung dann einfällt. Anregunden für Laufalgorithmen findest Du im Zweifel hier:
AntwortenLöschenhttps://en.wikipedia.org/wiki/The_Ministry_of_Silly_Walks
;-)